深圳双机器人机器人焊钳
机器人焊钳是工业生产中常用的自动化设备,但在使用过程中也会出现故障。常见的机器人焊钳故障包括:焊接不牢、焊接位置偏移、焊接质量不佳等。以下是机器人焊钳的故障排除方法:1.检查焊接参数:焊接参数设置不当是导致焊接质量不佳的主要原因之一。检查焊接参数是否符合要求,如电流、电压、焊接速度等。2.检查焊接材料:焊接材料的质量也会影响焊接质量。检查焊接材料是否符合要求,如焊丝直径、焊丝种类等。3.检查焊接设备:焊接设备的故障也会导致焊接质量不佳。检查焊接设备是否正常工作,如焊接头、电源等。4.检查机器人程序:机器人程序的编写不当也会导致焊接质量不佳。检查机器人程序是否符合要求,如焊接路径、焊接速度等。5.检查机器人机械结构:机器人机械结构的故障也会导致焊接位置偏移等问题。检查机器人机械结构是否正常,如机械臂、焊接头等。总之,机器人焊钳的故障排除需要综合考虑多个因素,从焊接参数、焊接材料、焊接设备、机器人程序、机器人机械结构等多个方面进行检查,找出故障原因并及时解决。机器人焊钳的控制系统稳定可靠,能够保证设备的长期稳定运行。深圳双机器人机器人焊钳
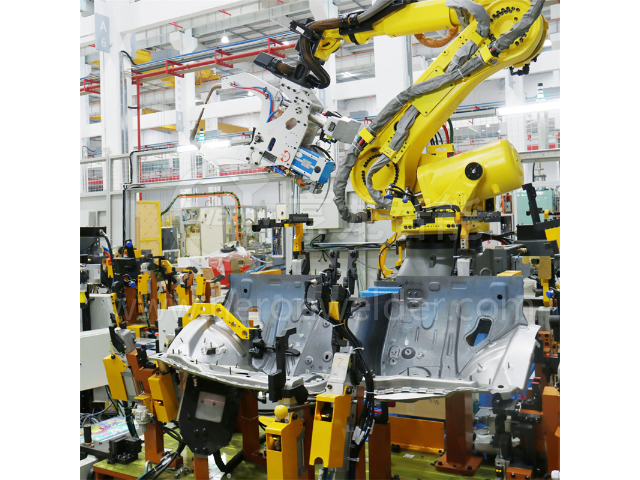
机器人焊钳是一种自动化焊接设备,由机器人手臂和焊钳组成。焊钳是机器人焊接的关键部件,它的结构设计直接影响到焊接质量和效率。机器人焊钳的结构通常包括以下几个部分:1.夹持器:夹持器是焊钳的主要部件,用于夹持焊接工件。夹持器通常由两个夹爪组成,夹爪之间的距离可以根据焊接工件的大小进行调整。2.电极:电极是焊接时传递电流的部件,通常由铜制成。电极的形状和大小可以根据焊接工件的形状和大小进行设计。3.冷却系统:焊接时会产生大量的热量,需要通过冷却系统来降温。冷却系统通常由水冷或气冷组成。4.传感器:传感器用于检测焊接工件的位置和形状,以便机器人可以准确地夹持焊接工件和进行焊接。5.控制系统:控制系统用于控制机器人焊钳的运动和焊接参数,包括焊接电流、焊接速度、焊接时间等。总之,机器人焊钳的结构设计需要考虑到焊接工件的形状和大小,以及焊接质量和效率的要求。通过合理的结构设计和控制系统,机器人焊钳可以实现高效、精确、稳定的自动化焊接。深圳双机器人机器人焊钳机器人焊钳的使用可以提高生产线的灵活性和适应性,能够快速适应市场需求的变化。

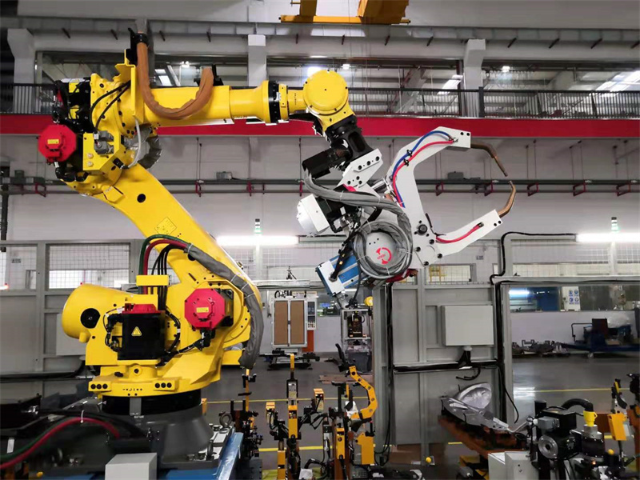
机器人焊钳的控制系统是由多个部分组成的,包括硬件和软件。硬件部分包括机器人本身、焊钳、传感器、控制器和电源等。软件部分则包括控制程序、运动规划、路径规划、力控制和通信等。机器人焊钳的控制系统的运作过程如下:1.运动规划:根据焊接任务的要求,通过运动规划算法计算机器人的运动轨迹和速度。2.路径规划:根据运动规划的结果,计算机器人的路径,确保机器人能够按照预定的轨迹移动。3.力控制:机器人焊钳需要对焊接件施加一定的力,以确保焊接质量。通过力传感器和控制器,控制机器人焊钳施加的力大小和方向。4.通信:机器人焊钳的控制系统需要与其他设备进行通信,如与焊接机器、传感器和计算机等进行数据交换和控制指令传输。5.控制程序:机器人焊钳的控制程序是整个控制系统的重心,它控制机器人的运动、力控制和通信等功能,确保机器人能够按照预定的轨迹和力度进行焊接。总之,机器人焊钳的控制系统是一个复杂的系统,需要多个部分协同工作,才能实现高效、精确的焊接任务。
机器人焊钳在焊接不同材料时有很大的区别。不同的材料具有不同的熔点、热膨胀系数和热导率,这些因素都会影响焊接的质量和效率。对于焊接不同材料的情况,机器人焊钳需要进行不同的调整和设置。例如,在焊接铝合金时,由于铝的热导率高,需要使用更高的焊接电流和更快的焊接速度,以确保焊接质量。而在焊接不锈钢时,由于不锈钢的热膨胀系数低,需要使用更低的焊接电流和更慢的焊接速度,以避免产生裂纹。此外,机器人焊钳在焊接不同材料时还需要使用不同的焊接材料和焊接气体。例如,在焊接铝合金时,需要使用铝合金焊丝和纯氩气体,以避免氧化和污染。而在焊接不锈钢时,需要使用不锈钢焊丝和混合气体,以提高焊接速度和质量。总之,机器人焊钳在焊接不同材料时需要进行不同的调整和设置,以确保焊接质量和效率。这需要对不同材料的特性有深入的了解和经验。机器人焊钳的使用能够提高生产线的灵活性和响应速度,适应市场需求的变化。
机器人焊钳的维护保养是保证其正常运行和延长使用寿命的重要措施。其主要内容包括以下几个方面:1.清洁保养:定期清洁焊钳表面和内部零部件,避免灰尘和杂物进入,影响机器人的正常运行。2.润滑维护:定期对焊钳的轴承、齿轮等零部件进行润滑,保证其灵活运转,减少磨损。3.检查维修:定期检查焊钳的各个部位是否有松动、磨损、裂纹等情况,及时进行维修和更换。4.电气维护:定期检查焊钳的电气系统,包括电缆、接线、开关等,确保其正常运行。5.程序更新:定期更新机器人焊接程序,保证其与焊钳的配合更加精确,提高焊接质量和效率。维护保养机器人焊钳需要专业技术和经验,建议由专业人员进行操作和维护,以确保机器人的正常运行和安全使用。机器人焊钳的使用可以提高生产线的稳定性和可靠性,减少生产线停机的风险。北京X型机器人焊钳电路图
机器人焊钳的操作过程中,能够实现远程监控和控制,提高生产管理的效率。深圳双机器人机器人焊钳
机器人焊钳实现自动化焊接需要经过以下步骤:1.设计焊接程序:根据焊接要求和工件形状,设计出适合的焊接程序,包括焊接路径、焊接速度、焊接电流等参数。2.安装机器人焊钳:将机器人焊钳安装在焊接设备上,调整好焊接角度和位置。3.编写控制程序:编写控制程序,将焊接程序转化为机器人焊钳能够识别和执行的指令。4.进行焊接:将工件放置在焊接设备上,启动机器人焊钳进行自动化焊接。5.检测焊接质量:通过焊接质量检测设备对焊接质量进行检测,确保焊接质量符合要求。机器人焊钳实现自动化焊接具有高效、精确、稳定等优点,可以很大程度的提高焊接效率和质量,减少人工操作的繁琐和危险。深圳双机器人机器人焊钳
上一篇: 深圳电热水壶壶嘴逆变焊机多少钱
下一篇: 深圳点焊机器人焊钳公司